
- Главная
- Гимнастика
- Тренировка
- 1984 год
- Обучение упражнениям с помощью технических средств управления
Обучение упражнениям с помощью технических средств управления
Дата: Январь 1984
Обучение гимнастическим упражнениям с помощью технических средств управления суставными движениями.
Одним из актуальных направлений в теории и практике спортивной гимнастики является совершенствование средств и методов обучения движениям. Обсуждая проблемы обучения в гимнастике, многие авторы приходят к выводу о несовершенстве традиционных средств, и методов обучения и необходимости их улучшения, в частности за счет более широкого привлечения для этих целей технических средств — от простейших страховочных приспособлений до тренажерных комплексов и обучающих машин.
Анализ современных концепций обучения двигательным действиям в спорте позволяет сделать следующие обобщения.
Во-первых, при обучении даже простым упражнениям необходимо ориентироваться не на безошибочное (с точки зрения правил соревнований) исполнение элемента, а на характеристики самых сложных упражнений данной структурной группы (Н. Г. Сучилин, 1978).
Такая постановка вопроса нацеливает на необходимость устранения из процесса обучения излишнего переучивания по мерс роста мастерства спортсменов (И. П. Ратов, 1980). Освоение с самого начала обучения по существу упрощенного аналога мастерского варианта упражнения рациональнее .осуществлять в искусственно созданных условиях. Такие условия могут быть реализованы с помощью технических средств обучения, позволяющих привести в соответствие возможности гимнаста с теми двигательными задачами, которые перед ним ставятся.
Во-вторых, важным положением современных теоретических концепций обучения двигательным навыкам является установка на необходимость разработки комплекса технических средств обучения, создающих благоприятные возможности для реализации двигательного потенциала занимающегося. При этом появляется возможность формировать в искусственно облегченных условиях характеристики ритмо-скоростной основы двигательного навыка, что относится к наиболее сложным проблемам обучения любому движению. А по мере выполнения этого условия «наполнять эту ритмо-скоростную основу силовым содержанием» (И. П. Ратов, 1980).
В-третьих, рассматривая обучение гимнастическим упражнениям, Ю. К. Гавердовский, Ф. П. Мамедов (1980) отмечают реальное существование императивного (повелительного) характера обучения, когда практически каждое действие занимающегося строго регламентировано и жестко контролируется до тех пор, пока это необходимо. Императивный характер обучения предполагает обучение с минимумом допускаемых ошибок. Подобное обучение предполагает физическую помощь в процессе выполнения занимающимися упражнения и особенно эффективное применение технических средств.
Важно подчеркнуть, что если в большинстве видов спорта проблема создания искусственных условии сводится в основном к компенсации недостаточности физических качеств, то в спортивной гимнастике помимо этого очень остро стоят задачи обеспечения правильной координации мышечных усилий и безопасности занимающегося.
Следовательно, для действенной реализации императивного характера обучения необходимы технические средства, которые могли бы, во-первых, компенсировать недостаточность физических качеств занимающихся, во-вторых, помочь ему овладеть правильной техникой и. в-третьих, обеспечить его полную безопасность. Кроме того, чрезвычайно важно, чтобы технические средства позволяли реализовать целостное выполнение упражнения или, по крайней мере, его относительно самостоятельных частей с реальными характеристиками, а также имели устройства срочной или текущей объективной информации.
Рассмотрение тренажеров и приспособлений, применяемых для обучения в спорте вообще и в гимнастике в частности, показывает, что подавляюще? большинство их предназначено для обеспечения безопасности выполнения упражнения, получения срочной и текущей информации о самых различных характеристиках движений, изменения внешних условий выполнения упражнений с целью компенсации моторной недостаточности занимающихся, уменьшения энергетических затрат на выполнение предварительных действий и т. п. Говоря, в частности, об изменении внешних условий, мы имеем в виду приспособления, предназначенные для ограничения отрицательного влияния силы тяжести (применяются в различных видах легкой атлетики, гимнастики, акробатики), сопротивления внешней среды (в плавании, гимнастике), для изменения упругих и инерционных свойств снарядов (практически во всех видах легкой атлетики, в гимнастике, акробатике) и т. д. Подобные технические средства во многих случаях дают хорошие результаты, однако возможность появления и закрепления двигательных ошибок они не исключают, так как поиск правильной, оптимальной техники предоставляют самому спортсмену. Значительно ближе к императивному характеру обучения стоят тренажеры и приспособления, помогающие решать задачи управления процессом становления двигательного навыка путем принудительного воспроизведения осваиваемого упражнения. Поскольку любое, даже самое сложное упражнение состоит из набора элементарных суставных движений, то логично заключить, что приспособления такого назначения должны осуществлять необходимое управление (в частном случае фиксацию позы гимнаста) и тем самым обеспечивать выполнение всего движения с заранее запланированными показателями. В гимнастике технические средства подобного типа были выделены одним из авторов настоящей работы и названы «тренажерами управления суставными движениями спортсмена» (С. П. Евсеев, 1978). На необходимость разработки подобных тренажеров указывает Н. Г. Сучилин (1980), однако примеров конкретных конструкций не приводит, хотя каждая из них представляет интерес.
Формально ближе всего к устройствам данного типа относятся средства электростимуляционной активации мышц в ходе выполнения упражнения, приспособления для ограничения траекторий отдельных точек, отклонений в положении звеньев (И. П. Ратов, 1976). Однако следует учитывать, что метод электростимуляция, действующий императивно, имеет принципиальное отличие от метода управления изменением суставных движений извне. Средства электростимуляции предназначены для формирования командного импульса к мышцам за счет моделирования эфферентных сигналов. Причем электростимуляционная активация мышц — это направление, требующее серьезных изысканий (определение мышц, которые необходимо стимулировать, выявление времени и способа подачи электрического сиг-нала и т. п.). Кроме того, техническая реализация этого приема обучения в настоящее время слишком дорогостояща, поэтому, если иметь в виду массовое обучение юных спортсменов, маловероятно, что в ближайшем будущем этот метод найдет широкое применение. В то же время необходимо указать, что приспособления, принудительно задающие или ограничивающие траектории отдельных точек или звеньев тела, давно и с успехом применяются в спортивной гимнастике. В частности, такого рода тренажеры описаны в работах Ф. Трайнера, А. А. Цомая, Ф. П. Мамедова, Б. М. Климовского с соавт., А. Ф. Гринштейна (1969), Н. Г. Сучилина (1974), Н. В. Акуленка, Н. Г. Городецкого и др. С помощью перечисленных тренажеров и приспособлений удается осуществить «ознакомительную проводку», «проводку с постановкой управляющих действий»; «облегченную проводку-помощь», «страховку» (Ю. К. Гавердовский, Ф. П. Мамедов, 1981) и другие методические приемы, существенно повышающие эффективность процесса обучения гимнастическим упражнениям.
Особую ценность представляют тренажеры, с помощью которых удается с большой точностью воспроизводить пространственно-временные характеристики перемещения тех или иных точек тела спортсмена (устройство Ф. П. Мамедова, Н. В. Акуленка, Н. Г. Городецкого). Использование для этих целей электромоторов, гидротормоза и других механизмов и машин позволяет освободить тренера от нетворческой физической работы и поднять эффективность учебного процесса на новый качественный уровень. Отмечая несомненную полезность и необходимость для практики устройств, оказывающих на гимнаста принудительное воздействие, следует указать, что они все-таки не решают окончательно задачи регламентации способа управления движениями, поскольку либо чрезмерно ограничивают активность спортсмена (тренажеры Ф. Трайнера и Б. М. Климовского с соавт.), либо предоставляют ему излишнюю свободу в выборе тех или иных суставных движений (тренажеры остальных авторов), что при неблагоприятных условиях (утомление, недостаточная требовательность тренера и т. п.) может привести к образованию и закреплению двигательных ошибок.
Большим шагом вперед в создании автоматических обучающих систем для овладения двигательными навыками является разработка Э. В. Гостевым и Н. Г. Сучилиным (1981) конструкции частично адаптивной машины, обеспечивающей с помощью электромотора перемещение гимнаста (вернее, его базовой точки) по заданной траектории и позволяющей совершать движения в суставах. При недостаточных или чрезмерных сгибаниях или разгибаниях в суставах (±3°) перемещение обучаемого прекращается и не возобновляется до полного исправления им ошибки. С помощью данного тренажера уже сегодня возможна автоматизация отдельных этапов и операций в обучении и подготовке спортсменов. В то же время нельзя не заметить, что при больших скоростях перемещения гимнаста срочный эффект в исправлении ошибок, на который рассчитывают авторы, будет снижен, поскольку положение, в котором допущена ошибка, и положение, в котором окажется обучаемый после его окончательной остановки, могут существенно различаться из-за инерционности тренажера и тела гимнаста. Логичным завершением идеи применения тренажерных устройств для оказания физической помощи ученику при обучении его двигательным действиям можно рассматривать появление в научно-методической литературе рекомендаций по разработке технических средств управления суставными движениями спортсмена (С. П. Евсеев, 1978), императивных обучающих машин типа активного экзоскелетона или антропоморфного механизма (Н. Г. Сучилин, 1980).
В связи с этим в работе были поставлены следующие задачи: разработать, изготовить и экспериментально проверить устройство для обучения гимнастическим упражнениям, обеспечивающее безопасное, целостное выполнение упражнения за счет принудительной фиксации и необходимого управления позой тела гимнаста. Помимо этого, ставилась задача разработки достаточно простого по конструкции и применению устройства, пригодного для обучения большой группе гимнастических элементов. Исходя из этого, был разработан тренажер для обучения группе упражнений, выполняемых большим махом. Наличие фиксированной оси (грифа перекладины, жерди брусьев и т. д.) позволило выполнить достаточно простое устройство, решающее поставленные задачи императивного обучения. С помощью устройства могут разучиваться большие обороты, отходы на перелеты и соскоки и другие упражнения, выполняемые в одной плоскости.
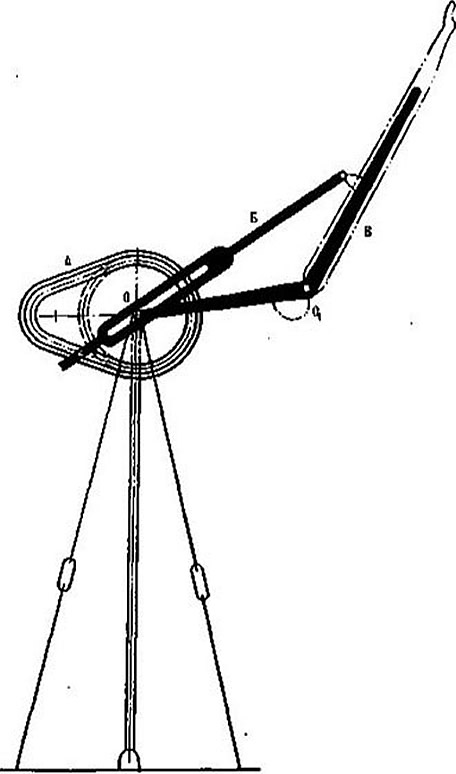
В основу конструкции, обеспечивающей фиксацию необходимой позы гимнаста, сгибание и разгибание в плечевых и тазобедренных суставах, положен принцип работы кулачково-кулисного механизма. Схема устройства для реализации простейшего варианта движения — сгибания и разгибания в одном суставе — представлена на рис. 1. Из рисунка видно, что, создавая различный профиль кулачка (А), можно обеспечить программное движение взаимодействующего с ним звена, в нашем случае — кулисы (Б), которая, как звено рычажного механизма, может вращаться вокруг неподвижной оси (О) — грифа перекладины — и перемещаться возвратно-поступательно относительно него. Кулиса (Б) шарнирно соединена со звеном (В), которое, в свою очередь, жестко связано с туловищем гимнаста. Таким образом, профиль кулачка (А) однозначно определяет степень приближения к оси (О) звена (В), величину угла OO1В, т. е. величину суставного угла, расположение о.ц.т. и ориентацию тела гимнаста. Другими словами, профиль кулачка однозначно определяет геометрический рисунок движения (в данном случае — двухзвенной системы).
При задании временных параметров движений, например кулисе (Б), с помощью специального приспособления или в крайнем случае физических усилий ассистента, однозначно задаются кинематические характеристики суставных движений, а следовательно, и программа места и программа ориентации конкретного упражнения во времени. Безусловно, применение физической помощи человека увеличивает диапазон отклонений от задаваемого рисунка упражнения и в принципе нежелательно при освоении движений, требующих большой точности (отходов на соскоки, перелетов и т. п.). Однако есть ряд соображений в пользу применения помощи ассистента при эксплуатации тренажера.
Во-первых, в этом случае тренажер не требует никаких дополнительных приспособлений, а следовательно, надежнее в эксплуатации и дешевле в изготовлении.
Во-вторых, имеется целая группа упражнений, допустимый диапазон вариативности характеристик которых вполне позволяет пренебречь теми отклонениями, которые возникают в связи с применением помощи человека. К таким упражнениям относятся, к примеру, оборотовые упражнения.
В-третьих, при достаточном опыте работы у тренера вырабатывается навык управления устройством, выражающийся в стабилизации его воздействий на тренажер, а следовательно, и на обучаемого.
В связи с этим здесь описана лишь механическая часть разработанного устройства.
Устройство для обучения вращательным движениям спортсменов (рис. 2) состоит из двух шарнирных трехзвенников, соединенных с перекладиной при помощи специальных узлов крепления. Причем средние звенья через внутренние штанги, а нижние звенья через наружные штанги соединены с помощью кулис и находящихся на них роликов с двумя парами кулачков в двух разборных плитах, жестко закрепленных на грифе перекладины. Формы кулачков однозначно определяют программу изменения углов в тазобедренных и плечевых суставах.
Звенья трехзвенников имеют приспособления, изменяющие их длину для «подгонки» тренажера под конкретного обучаемого. В принципе для обеспечения одинаковых суставных движений у гимнастов с различными . длинами звеньев необходимы различные кулачки. Однако, как показал проведенный педагогический эксперимент, юные гимнасты одного возраста в связи с жесткими требованиями отбора в спортивные школы имеют практически одинаковую длину рук, туловища, что позволяет использовать для всей группы одинаковые кулачки. В частности, различия, которые имели гимнасты в длине рук и туловища, изменяли величину суставных углов (при одном и том же кулачке) в пределах «ошибки устройства», обусловленной деформацией штанг, кулис и т. д. Таким образом, учитывая, что тренажер предназначен для начального обучения юных гимнастов, практически не отличающихся росто-весовыми показателями в пределах одного года рождения, вполне допустимо применение одного варианта кулачков для целой группы юных спортсменов. Хотя, безусловно, в случае необходимости замена кулачков может быть осуществлена.
Устройство изготовлено из легкого и прочного металла. Закрепленные на перекладине детали тренажера весят 6 кг. Части устройства, вращающиеся вместе с гимнастом вокруг грифа перекладины, также весят 6 кг и обладают незначительным моментом инерции, что практически не мешает гимнасту самостоятельно выполнять упражнение после его освоения.
Все детали устройства являются разборными, просты в изготовлении, эксплуатации, занимают небольшой объем при транспортировке и легко крепятся к стандартной перекладине в течение 30 минут. Фиксация в нем юного гимнаста осуществляется за 10—15 секунд.
В основу методики применения устройства положен принцип постепенной замены осуществляемого им внешнего управления внутренним управлением самостоятельными действиями самого спортсмена. Рассмотрим особенности методики на примере обучения большим оборотам назад юных гимнастов-новичков. Применив подход, используемый Ю. К. Гавердовским и Ф. П. Мамедовым (1980), условно выделим 5 шагов обучения, с тем чтобы можно было проследить изменение роли устройства и обучаемого.
Первый шаг — внешнее управление. Здесь гимнаст полностью лишен инициативы — все движение реализуется только за счет устройства. При обучении новичков целесообразна следующая последовательность заданий:
Гимнаст при этом как бы прислушивается к своим ощущениям, пытаясь связать их с внешними ориентирами.
Второй шаг — сочетание внутреннего и внешнего управления с полной экипировкой устройства. На этом уровне занимающийся пытается выполнить упражнение с помощью тренажера, однако в выборе возможных вариантов суставных движений он ограничен, так как устройство в любом случае реализует заданную программу двигательных действий. . Здесь также рекомендуется отработка движений сначала в одной, затем во второй паре суставов и лишь затем предлагается воспроизведение последовательности движений в обоих суставных сочленениях. Как показал педагогический эксперимент, при обучении суставным движениям с помощью данного устройства вначале необходимо концентрировать внимание занимающихся на воспроизведении сгибания в суставах, возлагая на тренажер функцию разгибательного движения, и лишь затем выполнять всю программу суставного движения. Особенно большое значение имеет этот методический прием при обучении правильному сочетанию движений в плечевых и тазобедренных суставах.
При отсутствии средств инструментального контроля критерием завершения данного шага может служить способность обучаемого выполнить вместе с устройством не менее двух больших оборотов без помощи тренера, начиная движение из исходного положения стойки на руках.
Третий шаг — сочетание внутреннего и внешнего управления с частичной экипировкой устройства. На данном этапе предполагается сочетание внешнего управления в плечевых суставах со свободными движениями в тазобедренных суставах. Достигается это путем снятия наружных штанг с примыкающими к ним наружными кулисами (рис. 2). Таким образом, обучаемый получает возможность самостоятельно выполнять упражнения с управляющими воздействиями со стороны тренажера, если в этом возникает необходимость, только на плечевые суставы. Причем на изменение угла в тазобедренных суставах накладываются некоторые ограничения — лимит на максимальные амплитуды сгибания и разгибания. В дальнейшем и это ограничение снимается путем исключения из конструкции устройства третьего (нижнего) звена трехзвенников (рис. 3).
Четвертый шаг — внутреннее управление в сочетании со страховкой и некоторыми внешними ограничениями. Здесь обучаемый выполняет упражнение самостоятельно в устройстве, но уже без внутренних штанг и примыкающих к ним кулис. Устройство в данном случае лишь страхует гимнаста и ограничивает амплитуды сгибания и разгибания в тазобедренных и плечевых суставах. Здесь также возможен вариант с ограничениями на амплитуды сгибания и разгибания только в плечевых суставах (за счет исключения нижнего звена трехзвенников). И, наконец, работа со страховочными кистевыми ремнями.
Пятый шаг — внутреннее управление (самостоятельное выполнение упражнения). На этом этапе обучаемые совершенствуют выполнение упражнения в различных условиях, в сочетании с другими элементами.
В заключение описания методики применения устройства заметим, что необходимость столь подробной системы заданий скорее исключение, чем правило, так как наличие элементарных двигательных способностей у занимающихся позволяет сократить количество перечисленных заданий.
Таким образом, разработанное и изготовленное устройство управления суставными движениями спортсмена, особенно в комплексе со средствами срочной информации (световой и звуковой индикацией), позволяет в полной мере реализовать императивный характер обучения гимнастическим элементам. Уровень развития техники позволяет изготовить тренажеры, способные реализовать практически любую программу суставных движений человека.
Что касается обоснования программы суставных движений конкретного упражнения, то оно может осуществляться двумя путями: по данным биомеханического анализа техники лучших исполнителей или с помощью механо-математического моделирования движений на ЭВМ (когда ставится задача обучить новому, невыполнявшемуся ранее или модифицированному упражнению). В последнем случае возможна следующая схема поиска оптимальной программы упражнения: составление и запись уравнений движения человека; определение в формализация управляющих воздействий, реализуемых спортсменом; определение способа решения уравнений; выбор и обоснование критериев оптимальности и ограничений, накладываемых на управление; решение задачи оптимизации техники по выбранным критериям.
Проверка устройства в педагогическом эксперименте показала его высокую эффективность и целесообразность применения для обучения целой группе оборотовых упражнений на перекладине.
С. П. Евсеев, доцент, к.п.н., Ю. Н. Рыкунов; ГДОИФК им. П. Ф. Лесгафта, г. Ленинград.
Одним из актуальных направлений в теории и практике спортивной гимнастики является совершенствование средств и методов обучения движениям. Обсуждая проблемы обучения в гимнастике, многие авторы приходят к выводу о несовершенстве традиционных средств, и методов обучения и необходимости их улучшения, в частности за счет более широкого привлечения для этих целей технических средств — от простейших страховочных приспособлений до тренажерных комплексов и обучающих машин.
Анализ современных концепций обучения двигательным действиям в спорте позволяет сделать следующие обобщения.
Во-первых, при обучении даже простым упражнениям необходимо ориентироваться не на безошибочное (с точки зрения правил соревнований) исполнение элемента, а на характеристики самых сложных упражнений данной структурной группы (Н. Г. Сучилин, 1978).
Такая постановка вопроса нацеливает на необходимость устранения из процесса обучения излишнего переучивания по мерс роста мастерства спортсменов (И. П. Ратов, 1980). Освоение с самого начала обучения по существу упрощенного аналога мастерского варианта упражнения рациональнее .осуществлять в искусственно созданных условиях. Такие условия могут быть реализованы с помощью технических средств обучения, позволяющих привести в соответствие возможности гимнаста с теми двигательными задачами, которые перед ним ставятся.
Во-вторых, важным положением современных теоретических концепций обучения двигательным навыкам является установка на необходимость разработки комплекса технических средств обучения, создающих благоприятные возможности для реализации двигательного потенциала занимающегося. При этом появляется возможность формировать в искусственно облегченных условиях характеристики ритмо-скоростной основы двигательного навыка, что относится к наиболее сложным проблемам обучения любому движению. А по мере выполнения этого условия «наполнять эту ритмо-скоростную основу силовым содержанием» (И. П. Ратов, 1980).
В-третьих, рассматривая обучение гимнастическим упражнениям, Ю. К. Гавердовский, Ф. П. Мамедов (1980) отмечают реальное существование императивного (повелительного) характера обучения, когда практически каждое действие занимающегося строго регламентировано и жестко контролируется до тех пор, пока это необходимо. Императивный характер обучения предполагает обучение с минимумом допускаемых ошибок. Подобное обучение предполагает физическую помощь в процессе выполнения занимающимися упражнения и особенно эффективное применение технических средств.
Важно подчеркнуть, что если в большинстве видов спорта проблема создания искусственных условии сводится в основном к компенсации недостаточности физических качеств, то в спортивной гимнастике помимо этого очень остро стоят задачи обеспечения правильной координации мышечных усилий и безопасности занимающегося.
Следовательно, для действенной реализации императивного характера обучения необходимы технические средства, которые могли бы, во-первых, компенсировать недостаточность физических качеств занимающихся, во-вторых, помочь ему овладеть правильной техникой и. в-третьих, обеспечить его полную безопасность. Кроме того, чрезвычайно важно, чтобы технические средства позволяли реализовать целостное выполнение упражнения или, по крайней мере, его относительно самостоятельных частей с реальными характеристиками, а также имели устройства срочной или текущей объективной информации.
Рассмотрение тренажеров и приспособлений, применяемых для обучения в спорте вообще и в гимнастике в частности, показывает, что подавляюще? большинство их предназначено для обеспечения безопасности выполнения упражнения, получения срочной и текущей информации о самых различных характеристиках движений, изменения внешних условий выполнения упражнений с целью компенсации моторной недостаточности занимающихся, уменьшения энергетических затрат на выполнение предварительных действий и т. п. Говоря, в частности, об изменении внешних условий, мы имеем в виду приспособления, предназначенные для ограничения отрицательного влияния силы тяжести (применяются в различных видах легкой атлетики, гимнастики, акробатики), сопротивления внешней среды (в плавании, гимнастике), для изменения упругих и инерционных свойств снарядов (практически во всех видах легкой атлетики, в гимнастике, акробатике) и т. д. Подобные технические средства во многих случаях дают хорошие результаты, однако возможность появления и закрепления двигательных ошибок они не исключают, так как поиск правильной, оптимальной техники предоставляют самому спортсмену. Значительно ближе к императивному характеру обучения стоят тренажеры и приспособления, помогающие решать задачи управления процессом становления двигательного навыка путем принудительного воспроизведения осваиваемого упражнения. Поскольку любое, даже самое сложное упражнение состоит из набора элементарных суставных движений, то логично заключить, что приспособления такого назначения должны осуществлять необходимое управление (в частном случае фиксацию позы гимнаста) и тем самым обеспечивать выполнение всего движения с заранее запланированными показателями. В гимнастике технические средства подобного типа были выделены одним из авторов настоящей работы и названы «тренажерами управления суставными движениями спортсмена» (С. П. Евсеев, 1978). На необходимость разработки подобных тренажеров указывает Н. Г. Сучилин (1980), однако примеров конкретных конструкций не приводит, хотя каждая из них представляет интерес.
Формально ближе всего к устройствам данного типа относятся средства электростимуляционной активации мышц в ходе выполнения упражнения, приспособления для ограничения траекторий отдельных точек, отклонений в положении звеньев (И. П. Ратов, 1976). Однако следует учитывать, что метод электростимуляция, действующий императивно, имеет принципиальное отличие от метода управления изменением суставных движений извне. Средства электростимуляции предназначены для формирования командного импульса к мышцам за счет моделирования эфферентных сигналов. Причем электростимуляционная активация мышц — это направление, требующее серьезных изысканий (определение мышц, которые необходимо стимулировать, выявление времени и способа подачи электрического сиг-нала и т. п.). Кроме того, техническая реализация этого приема обучения в настоящее время слишком дорогостояща, поэтому, если иметь в виду массовое обучение юных спортсменов, маловероятно, что в ближайшем будущем этот метод найдет широкое применение. В то же время необходимо указать, что приспособления, принудительно задающие или ограничивающие траектории отдельных точек или звеньев тела, давно и с успехом применяются в спортивной гимнастике. В частности, такого рода тренажеры описаны в работах Ф. Трайнера, А. А. Цомая, Ф. П. Мамедова, Б. М. Климовского с соавт., А. Ф. Гринштейна (1969), Н. Г. Сучилина (1974), Н. В. Акуленка, Н. Г. Городецкого и др. С помощью перечисленных тренажеров и приспособлений удается осуществить «ознакомительную проводку», «проводку с постановкой управляющих действий»; «облегченную проводку-помощь», «страховку» (Ю. К. Гавердовский, Ф. П. Мамедов, 1981) и другие методические приемы, существенно повышающие эффективность процесса обучения гимнастическим упражнениям.
Особую ценность представляют тренажеры, с помощью которых удается с большой точностью воспроизводить пространственно-временные характеристики перемещения тех или иных точек тела спортсмена (устройство Ф. П. Мамедова, Н. В. Акуленка, Н. Г. Городецкого). Использование для этих целей электромоторов, гидротормоза и других механизмов и машин позволяет освободить тренера от нетворческой физической работы и поднять эффективность учебного процесса на новый качественный уровень. Отмечая несомненную полезность и необходимость для практики устройств, оказывающих на гимнаста принудительное воздействие, следует указать, что они все-таки не решают окончательно задачи регламентации способа управления движениями, поскольку либо чрезмерно ограничивают активность спортсмена (тренажеры Ф. Трайнера и Б. М. Климовского с соавт.), либо предоставляют ему излишнюю свободу в выборе тех или иных суставных движений (тренажеры остальных авторов), что при неблагоприятных условиях (утомление, недостаточная требовательность тренера и т. п.) может привести к образованию и закреплению двигательных ошибок.
Большим шагом вперед в создании автоматических обучающих систем для овладения двигательными навыками является разработка Э. В. Гостевым и Н. Г. Сучилиным (1981) конструкции частично адаптивной машины, обеспечивающей с помощью электромотора перемещение гимнаста (вернее, его базовой точки) по заданной траектории и позволяющей совершать движения в суставах. При недостаточных или чрезмерных сгибаниях или разгибаниях в суставах (±3°) перемещение обучаемого прекращается и не возобновляется до полного исправления им ошибки. С помощью данного тренажера уже сегодня возможна автоматизация отдельных этапов и операций в обучении и подготовке спортсменов. В то же время нельзя не заметить, что при больших скоростях перемещения гимнаста срочный эффект в исправлении ошибок, на который рассчитывают авторы, будет снижен, поскольку положение, в котором допущена ошибка, и положение, в котором окажется обучаемый после его окончательной остановки, могут существенно различаться из-за инерционности тренажера и тела гимнаста. Логичным завершением идеи применения тренажерных устройств для оказания физической помощи ученику при обучении его двигательным действиям можно рассматривать появление в научно-методической литературе рекомендаций по разработке технических средств управления суставными движениями спортсмена (С. П. Евсеев, 1978), императивных обучающих машин типа активного экзоскелетона или антропоморфного механизма (Н. Г. Сучилин, 1980).
В связи с этим в работе были поставлены следующие задачи: разработать, изготовить и экспериментально проверить устройство для обучения гимнастическим упражнениям, обеспечивающее безопасное, целостное выполнение упражнения за счет принудительной фиксации и необходимого управления позой тела гимнаста. Помимо этого, ставилась задача разработки достаточно простого по конструкции и применению устройства, пригодного для обучения большой группе гимнастических элементов. Исходя из этого, был разработан тренажер для обучения группе упражнений, выполняемых большим махом. Наличие фиксированной оси (грифа перекладины, жерди брусьев и т. д.) позволило выполнить достаточно простое устройство, решающее поставленные задачи императивного обучения. С помощью устройства могут разучиваться большие обороты, отходы на перелеты и соскоки и другие упражнения, выполняемые в одной плоскости.
В основу конструкции, обеспечивающей фиксацию необходимой позы гимнаста, сгибание и разгибание в плечевых и тазобедренных суставах, положен принцип работы кулачково-кулисного механизма. Схема устройства для реализации простейшего варианта движения — сгибания и разгибания в одном суставе — представлена на рис. 1. Из рисунка видно, что, создавая различный профиль кулачка (А), можно обеспечить программное движение взаимодействующего с ним звена, в нашем случае — кулисы (Б), которая, как звено рычажного механизма, может вращаться вокруг неподвижной оси (О) — грифа перекладины — и перемещаться возвратно-поступательно относительно него. Кулиса (Б) шарнирно соединена со звеном (В), которое, в свою очередь, жестко связано с туловищем гимнаста. Таким образом, профиль кулачка (А) однозначно определяет степень приближения к оси (О) звена (В), величину угла OO1В, т. е. величину суставного угла, расположение о.ц.т. и ориентацию тела гимнаста. Другими словами, профиль кулачка однозначно определяет геометрический рисунок движения (в данном случае — двухзвенной системы).
При задании временных параметров движений, например кулисе (Б), с помощью специального приспособления или в крайнем случае физических усилий ассистента, однозначно задаются кинематические характеристики суставных движений, а следовательно, и программа места и программа ориентации конкретного упражнения во времени. Безусловно, применение физической помощи человека увеличивает диапазон отклонений от задаваемого рисунка упражнения и в принципе нежелательно при освоении движений, требующих большой точности (отходов на соскоки, перелетов и т. п.). Однако есть ряд соображений в пользу применения помощи ассистента при эксплуатации тренажера.
Во-первых, в этом случае тренажер не требует никаких дополнительных приспособлений, а следовательно, надежнее в эксплуатации и дешевле в изготовлении.
Во-вторых, имеется целая группа упражнений, допустимый диапазон вариативности характеристик которых вполне позволяет пренебречь теми отклонениями, которые возникают в связи с применением помощи человека. К таким упражнениям относятся, к примеру, оборотовые упражнения.
В-третьих, при достаточном опыте работы у тренера вырабатывается навык управления устройством, выражающийся в стабилизации его воздействий на тренажер, а следовательно, и на обучаемого.
В связи с этим здесь описана лишь механическая часть разработанного устройства.
Устройство для обучения вращательным движениям спортсменов (рис. 2) состоит из двух шарнирных трехзвенников, соединенных с перекладиной при помощи специальных узлов крепления. Причем средние звенья через внутренние штанги, а нижние звенья через наружные штанги соединены с помощью кулис и находящихся на них роликов с двумя парами кулачков в двух разборных плитах, жестко закрепленных на грифе перекладины. Формы кулачков однозначно определяют программу изменения углов в тазобедренных и плечевых суставах.

Звенья трехзвенников имеют приспособления, изменяющие их длину для «подгонки» тренажера под конкретного обучаемого. В принципе для обеспечения одинаковых суставных движений у гимнастов с различными . длинами звеньев необходимы различные кулачки. Однако, как показал проведенный педагогический эксперимент, юные гимнасты одного возраста в связи с жесткими требованиями отбора в спортивные школы имеют практически одинаковую длину рук, туловища, что позволяет использовать для всей группы одинаковые кулачки. В частности, различия, которые имели гимнасты в длине рук и туловища, изменяли величину суставных углов (при одном и том же кулачке) в пределах «ошибки устройства», обусловленной деформацией штанг, кулис и т. д. Таким образом, учитывая, что тренажер предназначен для начального обучения юных гимнастов, практически не отличающихся росто-весовыми показателями в пределах одного года рождения, вполне допустимо применение одного варианта кулачков для целой группы юных спортсменов. Хотя, безусловно, в случае необходимости замена кулачков может быть осуществлена.
Устройство изготовлено из легкого и прочного металла. Закрепленные на перекладине детали тренажера весят 6 кг. Части устройства, вращающиеся вместе с гимнастом вокруг грифа перекладины, также весят 6 кг и обладают незначительным моментом инерции, что практически не мешает гимнасту самостоятельно выполнять упражнение после его освоения.
Все детали устройства являются разборными, просты в изготовлении, эксплуатации, занимают небольшой объем при транспортировке и легко крепятся к стандартной перекладине в течение 30 минут. Фиксация в нем юного гимнаста осуществляется за 10—15 секунд.
В основу методики применения устройства положен принцип постепенной замены осуществляемого им внешнего управления внутренним управлением самостоятельными действиями самого спортсмена. Рассмотрим особенности методики на примере обучения большим оборотам назад юных гимнастов-новичков. Применив подход, используемый Ю. К. Гавердовским и Ф. П. Мамедовым (1980), условно выделим 5 шагов обучения, с тем чтобы можно было проследить изменение роли устройства и обучаемого.
Первый шаг — внешнее управление. Здесь гимнаст полностью лишен инициативы — все движение реализуется только за счет устройства. При обучении новичков целесообразна следующая последовательность заданий:
- медленная «проводка» без изменения углов в суставах с фиксацией положения виса, стойки на руках, горизонтальных и промежуточных положений;
- «проводка» без изменения углов в суставах с необходимой скоростью и подачей команд во время прохождения гимнастом нижней и верхней вертикалей, горизонталей;
- «проводка» с изменением углов вначале только в тазобедренных суставах, затем только в плечевых суставах и, наконец, с необходимым сочетанием изменения углов в суставах.
Гимнаст при этом как бы прислушивается к своим ощущениям, пытаясь связать их с внешними ориентирами.
Второй шаг — сочетание внутреннего и внешнего управления с полной экипировкой устройства. На этом уровне занимающийся пытается выполнить упражнение с помощью тренажера, однако в выборе возможных вариантов суставных движений он ограничен, так как устройство в любом случае реализует заданную программу двигательных действий. . Здесь также рекомендуется отработка движений сначала в одной, затем во второй паре суставов и лишь затем предлагается воспроизведение последовательности движений в обоих суставных сочленениях. Как показал педагогический эксперимент, при обучении суставным движениям с помощью данного устройства вначале необходимо концентрировать внимание занимающихся на воспроизведении сгибания в суставах, возлагая на тренажер функцию разгибательного движения, и лишь затем выполнять всю программу суставного движения. Особенно большое значение имеет этот методический прием при обучении правильному сочетанию движений в плечевых и тазобедренных суставах.
При отсутствии средств инструментального контроля критерием завершения данного шага может служить способность обучаемого выполнить вместе с устройством не менее двух больших оборотов без помощи тренера, начиная движение из исходного положения стойки на руках.
Третий шаг — сочетание внутреннего и внешнего управления с частичной экипировкой устройства. На данном этапе предполагается сочетание внешнего управления в плечевых суставах со свободными движениями в тазобедренных суставах. Достигается это путем снятия наружных штанг с примыкающими к ним наружными кулисами (рис. 2). Таким образом, обучаемый получает возможность самостоятельно выполнять упражнения с управляющими воздействиями со стороны тренажера, если в этом возникает необходимость, только на плечевые суставы. Причем на изменение угла в тазобедренных суставах накладываются некоторые ограничения — лимит на максимальные амплитуды сгибания и разгибания. В дальнейшем и это ограничение снимается путем исключения из конструкции устройства третьего (нижнего) звена трехзвенников (рис. 3).
Четвертый шаг — внутреннее управление в сочетании со страховкой и некоторыми внешними ограничениями. Здесь обучаемый выполняет упражнение самостоятельно в устройстве, но уже без внутренних штанг и примыкающих к ним кулис. Устройство в данном случае лишь страхует гимнаста и ограничивает амплитуды сгибания и разгибания в тазобедренных и плечевых суставах. Здесь также возможен вариант с ограничениями на амплитуды сгибания и разгибания только в плечевых суставах (за счет исключения нижнего звена трехзвенников). И, наконец, работа со страховочными кистевыми ремнями.
Пятый шаг — внутреннее управление (самостоятельное выполнение упражнения). На этом этапе обучаемые совершенствуют выполнение упражнения в различных условиях, в сочетании с другими элементами.
В заключение описания методики применения устройства заметим, что необходимость столь подробной системы заданий скорее исключение, чем правило, так как наличие элементарных двигательных способностей у занимающихся позволяет сократить количество перечисленных заданий.
Таким образом, разработанное и изготовленное устройство управления суставными движениями спортсмена, особенно в комплексе со средствами срочной информации (световой и звуковой индикацией), позволяет в полной мере реализовать императивный характер обучения гимнастическим элементам. Уровень развития техники позволяет изготовить тренажеры, способные реализовать практически любую программу суставных движений человека.
Что касается обоснования программы суставных движений конкретного упражнения, то оно может осуществляться двумя путями: по данным биомеханического анализа техники лучших исполнителей или с помощью механо-математического моделирования движений на ЭВМ (когда ставится задача обучить новому, невыполнявшемуся ранее или модифицированному упражнению). В последнем случае возможна следующая схема поиска оптимальной программы упражнения: составление и запись уравнений движения человека; определение в формализация управляющих воздействий, реализуемых спортсменом; определение способа решения уравнений; выбор и обоснование критериев оптимальности и ограничений, накладываемых на управление; решение задачи оптимизации техники по выбранным критериям.
Проверка устройства в педагогическом эксперименте показала его высокую эффективность и целесообразность применения для обучения целой группе оборотовых упражнений на перекладине.
С. П. Евсеев, доцент, к.п.н., Ю. Н. Рыкунов; ГДОИФК им. П. Ф. Лесгафта, г. Ленинград.
Гимнастика. Ежегодник. Второй выпуск 1984 года.
Большое спасибо: Boosty Labs Outsource Angular development outsource team
Предыдущие статьи
→ Гимнастам нужна и медленная сила
→ Большой оборот назад на брусьях
→ Обучение гимнастическим упражнениям в свете понятия адаптивности
→ Пульсовая характеристика тренировочного процесса гимнасток 10—12 лет
→ Нагрузки в групповых упражнениях на предсоревновательном этапе
→ Утренняя гимнастика в ИФК — важный компонент подготовки
→ Питьевой режим гимнастов
→ Оздоровительная гимнастика для женщин
→ Большой оборот назад на брусьях
→ Обучение гимнастическим упражнениям в свете понятия адаптивности
→ Пульсовая характеристика тренировочного процесса гимнасток 10—12 лет
→ Нагрузки в групповых упражнениях на предсоревновательном этапе
→ Утренняя гимнастика в ИФК — важный компонент подготовки
→ Питьевой режим гимнастов
→ Оздоровительная гимнастика для женщин
Текущая статья
• Обучение упражнениям с помощью технических средств управления
Следующие статьи
→ Мини-батут для обучения маховым упражнениям на перекладине
→ Специализированные подвижные игры в подготовке юных гимнастов
→ Оценке тренировочных нагрузок на этапе отбора и начальной подготовки
→ Улучшение условий занятий с помощью функциональной музыки
→ О композиции групповых упражнений в художественной гимнастике
→ Асимметрично утяжеленные предметы в художественной гимнастике
→ Обучение приходам в стойку на руках на «решетку» в акробатике
→ Специализированные подвижные игры в подготовке юных гимнастов
→ Оценке тренировочных нагрузок на этапе отбора и начальной подготовки
→ Улучшение условий занятий с помощью функциональной музыки
→ О композиции групповых упражнений в художественной гимнастике
→ Асимметрично утяжеленные предметы в художественной гимнастике
→ Обучение приходам в стойку на руках на «решетку» в акробатике
Разместите ссылку на статью на своем сайте, блоге или форуме:
HTMLTextBB Code
Напишите свой отзыв к этой статье
Пока нет комментариев, смелее!
Мини-батут для обучения маховым упражнениям на перекладине
Улучшение условий занятий с помощью функциональной музыки
Обучение приходам в стойку на руках на «решетку» в акробатике
Характеристика групповых упражнений в художественной гимнастике
О композиции групповых упражнений в художественной гимнастике
Джаз-гимнастика — танцевально-гимнастические упражнения
Нагрузки в групповых упражнениях на предсоревновательном этапе