
- Главная
- Велоспорт
- Тренировка
- 1984 год
- Комплексный стенд для тестирования велосипедистов
Комплексный стенд для тестирования велосипедистов
Дата: Январь 1984
Па современном уровне развития велосипедного спорта для совершенствования планирования и проведения учебно-тренировочного процесса необходимы не только этапное тестирование функционального состояния спортсменов, но и биомеханический анализ техники педалирования.
В практике велоспорта тестирование и тренировка обычно производятся на велоэргометрах или на велостанках различной модификации. Основное требование, предъявляемое к такому виду технических устройств, — высокая точность регистрации динамических и кинематических характеристик педалирования в сочетании с экспресс-информацией о создаваемой спортсменом структуре соревновательного упражнения и приближенность режимов тренировочной деятельности в искусственных условиях к естественным. Для этого кинетическая энергия движения велосипедиста на треке или шоссе должна равняться кинетической энергии вращающихся частей на велотренажере, а сила торможения — силе сопротивления воздуха, возникающей вследствие движения велосипедиста. Для выполнения этих условий масса маховика на велотренажере подбирается равной 70—120 кг (Ю. Я. Прокопенко, С. С. Богдасанов, 1969; А. А. Кузнецов, 1978), а тренажер снабжают специальным тормозным устройством (М. Д. Азатян, 1960; М. Л. Пальцев, 1974). С целью имитации движения велосипедиста по трассе или треку велотренажеры могут комплектоваться лидирующими устройствами (Ю. К. Дравниек, И. В. Аулик, 1977) или проекционным экраном, воспроизводящим визуальную картину трассы (В. А. Коваленко, 1976). Однако недостатком подобного рода тренажеров остается значительное отличие условий тренировки на них от естественных.
С целью проведения исследования биомеханической модели спортивного педалирования, критериев технического мастерства и создания средств и методов управления движениями велосипедистов совместно с лабораторией биомеханики Всесоюзного научно-исследовательского института физической культуры выполнен специальный комплексный стенд для тестирования и тренировки велосипедистов.
Стенд сконструирован на базе велостанка, задние ролики которого имеют массу 115 кг, что при скорости 40—50 км/ч создает такой же момент количества движения, который наблюдается у системы спортсмен — велосипед с массой 70—80 кг в условиях трека.
Тормозящий момент, моделирующий сопротивление воздуха, создается специальным прижимным резиновым роликом, степень давления которого подбиралась экспериментально с учетом равенства мощности при педалировании с одинаковой скоростью на треке и велостенде. Для этого за основу взято положение о том, что мощность (N), развиваемая велосипедистом в условиях движения на треке, идет на преодоление сопротивления воздуха (Nв), трения качения о полотно трека (Nк), трения механических частей велосипеда (Nм) и на перемещение звеньев тела при педалировании относительно центра массы (Nз),

В случае педалирования на велостенде это выражение принимает вид:

где Nс — мощность силы трения частей велостенда;
Nт — мощность силы трения прижимного ролика.
Для спортсменов, педалирующих на своих велосипедах с одинаковой скоростью и на тех же передачах в условиях трека и велостенда, мощности, затрачиваемые на преодоление трения в подвижных частях велосипеда и на перемещение звеньев тела в естественных и искусственных условиях, будут равны. Тогда для эквивалентности механической работы необходимо равенство суммы первых двух слагаемых уравнений (1) и (2), т. е. сумма мощностей, идущих на преодоление сопротивления воздуха и трения качения при движении в естественных условиях, должна равняться сумме мощностей сил трения вращающихся частей велостенда и трения, создаваемого прижимным роликом. В этом случае условием полной идентичности движения велосипедиста в искусственных и естественных условиях будет соответствие динамических усилий, прилагаемых к педалям на одних и тех же скоростях
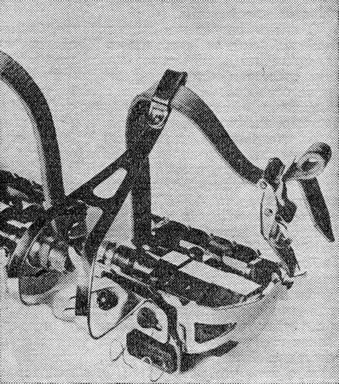
Регистрация динамических характеристик велосипедного педалирования осуществляется специально разработанными гензопедалями (рис. 1) и тензовелодинамометром (рис. 2). Конструкция тензопедали позволяет регистрировать усилия, развиваемые в плоскости педали, а также усилия, направленные перпендикулярно к ней. С помощью этой конструкции можно определять положение педали относительно шатуна велосипеда.
Для определения положения шатуна на окружности выполнена система (см. рис. 2), включающая в себя диск, закрепленный на ведущей шестерне и имеющий отверстия, расположенные через 30° по окружности, а также фотоэлектронное устройство, срабатывающее при прохождении мимо него отверстия диска. Для начала отсчета координат на диске сделано дополнительное отверстие, соответствующее положению правого шатуна в верхней «мертвой точке» — 0°. Данные с тензопедалей и устройства, регистрирующего положение шатуна на окружности, позволяют получать полную информацию о технике педалирования испытуемых.
В силоизмерительных элементах тензопедалей и тензовелодинамометра использованы полупроводниковые кремневые тензометры КТД2Б. Подбор и наклейка тензометров осуществлялись в соответствии с техническими условиями, разработанными отделом тензометрирования ВИСТИ.
Сборка тензометров на обоих приборах осуществлена по так называемой мостовой схеме (Б. В. Миненков, 1967).
Конструкция тензопедялей и тензовелодинамометра обеспечивает линейность динамических характеристик. Тарировка тензопедалей производилась по горизонтали от 1 до 50 кг, по вертикали — от 1 до 100 кг. Тензовелодинамометр тарировался от 1 до 120 кг. Погрешность измерений не превышает 5%.
Сигналы с тензопедалей, тензовелодинамометра и фотоэлектронного устройства, определяющего положение шатуна на окружности, в зависимости от задач исследования синхронно регистрируются на ленте шлейфного осциллографа К-121, выводятся на вектороэлектрокардиоскоп ВЭКС-01 и подаются на входы аналоговой вычислительной машины АВК-31 для последующей обработки.
Тензовелодинамометр применяется для регистрации суммарного полезного (тангенциального) усилия, развиваемого спортсменом на педалях.
Полезная мощность, развиваемая велосипедистом, может быть рассчитана по формуле:
где Fср.т — среднее тангенциальное (полезное) усилие, прилагаемое к шатунам за цикл;
l — длина окружности, описываемой педалью;
Т — время цикла.
Величина мощности в экспериментах регистрировалась тензовелодинамометром и рассчитывалась аналоговой вычислительной машиной АВК-31. При этом использовалась следующая вычислительная процедура:
где R — длина шатуна;
Т — период цикла педалирования;
Fт — сила, регистрируемая тензовелодинамометром; ,
dt — расстояние, пройденное шатуном за измеряемый отрезок времени.
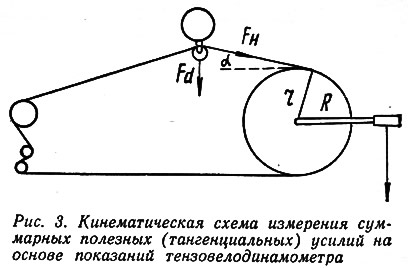
Эта формула получена при анализе кинематической схемы, представленной на рис. 3. При этом считалось, что круговая частота педалирования постоянна в течение всего цикла, так как расчеты показывают, что величина изменений круговой частоты в цикле при равномерном движении велосипедиста не превышает 1%.
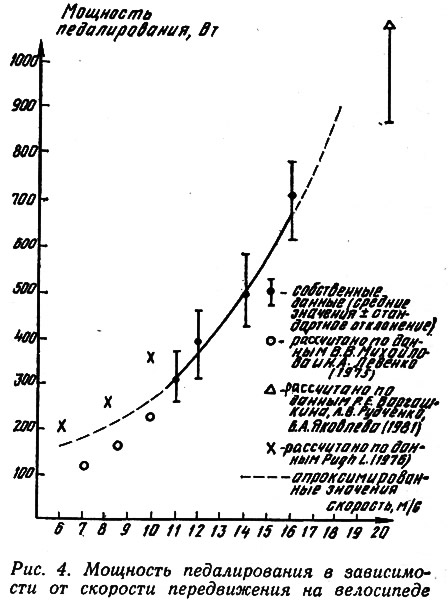
Данный подход использовался для получения зависимости скорости передвижения велосипедиста по треку от величины полезной мощности, развиваемой на педалях, С этой целью велосипед, оснащенный тензопедалями и тензовелодинамометром, был укомплектован радиотелеметрической системой «Спорт-4». Величина усилий в виде электрических сигналов передавалась через радиоканал, записывалась на магнитофоне «Брюль и Къер» и обрабатывалась на аналоговой вычислительной машине АВК-31. Полученная зависимость представлена на рис. 4.
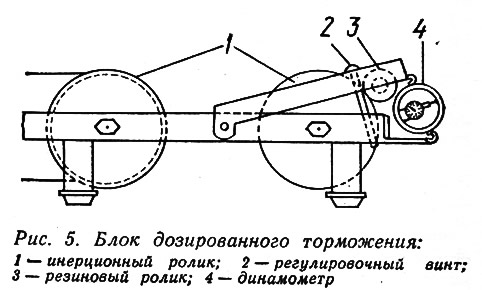
На основе полученной зависимости производилась тарировка величины прижима ролика к валу велостенда. Конструкция этого узла представлена на рис. 5. Во время педалирования на стенде путем изменения усилия стяжным винтом добивались равенства полезной мощности, развиваемой велосипедистом на педалях, значениям, полученным при движении по треку. После тарировки были сняты годографы усилий при педалировании на велостенде и треке. Анализ полученных данных указывает на то, что разработанный велостенд обеспечивает воспроизведение естественных режимов педалирования не только по мощности, но и по характеру динамических усилий на педалях.
Для точного определения расстояния, условно проезжаемого велосипедистом на стенде, длина окружности роликов выполнена равной 0,3333 м, что составляет 0,001 от длины полотна трека. Подсчет числа оборотов ролика позволяет определить условно пройденное расстояние с точностью до 0,3 м. С этой целью на велостенде установлен фотоэлектрический датчик.
Моделирование движения по треку осуществляется при помощи электронного прибора «Лидер», устанавливаемого перед спортсменом. На экране прибора по овалу в виде трека расположены микролампочки. Внешний круг предназначен для светолидера, внутренний — отражает истинную скорость движения велосипедиста. Конструкцией «Лидера» предусмотрено начало движения со старта в индивидуальном темпе. После прохождения половины первого крута включается лидирующий ряд лампочек, «ведущий» спортсмена на запланированный результат. На лицевой панели прибора установлены соответствующие тумблеры и световое табло, показывающее время прохождения каждого круга и число пройденных кругов.
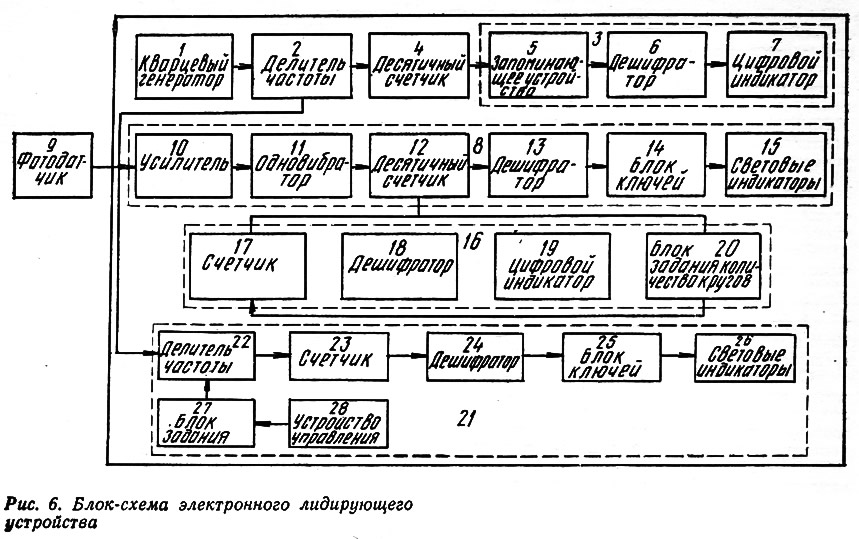
На рис. 6 представлена блок-схема электронного устройства «Лидер». Принцип его работы следующий: после включения тумблера «Старт» в устройстве управления и начала педалирования (вращения инерционных роликов с нанесенной на одном из них световой меткой) импульсы, зарегистрированные фотодатчиком 9, усиливаются усилителем 10 и поступают на вход одновибратора 11. Длительность импульсов, вырабатываемых одновибратором, равна 20 мс и выбрана из учета максимальной скорости велосипедиста. Введение в схему устройства одновибратора 11 исключает ложное срабатывание при возникновении световой помехи на фотодатчике 9. Импульсы с входа одновибратора 11 поступают на вход счетчика 12. Коэффициент счетчика равен 1000, что соответствует длине трека (т. е. 1000 оборотов инерционного ролика на стенде соответствует 1 кругу на треке). С выхода счетчика 12 импульсы в параллельном коде поступают на вход дешифратора 13, где преобразуются в последовательный код и, проходя через блок ключей 14, служащих для умножения дешифратора 13, поочередно включают световые индикаторы 15, расположенные на лицевой панели прибора, и показывают место, где на «треке» находится в данный момент велосипедист. Для задания определенной скорости движения велосипедиста служит световой лидер 21, который позволяет задавать время в пределах от 20 до 30 с на один круг с интервалом 0,5 с, что соответствует результату от III разряда до результата, превышающего мировой рекорд. Информация о величине скорости передается велосипедисту путем изменения скорости бегущей световой дорожки. Счетчик кругов 16 служит для задания числа кругов от 1 до 12 (что равняется дистанции от 333,3 м до 4 км). После того как будет достигнуто установленное число кругов, происходит автоматическая остановка светового лидера.
Одновременно с включением тумблера «Старт» происходит запуск электронного секундомера, который регистрирует время прохождения дистанции с точностью 0,01 с. Предъявление информации о величине времени происходит после прохождения каждого круга и прекращается после прохождения всей дистанции. Выведение всех электронных световых табло в нулевое положение осуществляется путем перевода тумблера на устройстве управления в положение «0».
На велостенде, оснащенном «Лидером», можно проводить тестирование спортсмена на его «боевом» велосипеде в привычной для него посадке и на любой передаче.
С целью проверки идентичности условий педалирования на велостенде и в естественных условиях трека был проведен эксперимент, в котором приняли участие 8 спортсменов (спортивная квалификация от II разряда до мастера спорта). Спортсмены первоначально в соревновательных условиях на треке преодолели 1 и 4 км с места, затем такие же испытания были проведены в условиях стенда. Математическая обработка данных показала, что результаты тестирования на велостенде имеют высокую статистически достоверную связь со спортивным результатом на треке (r=0,89), что позволяет воспроизводить его на велостенде с точностью ±0,65 с на дистанции 1 км и ±2,60 с — на 4 км.
Таким образом, разработанный стенд позволяет с высокой точностью моделировать условия соревновательной деятельности и в совокупности с другими методиками, такими как газоанализ, вектородинамография, миография, сейсмомиотонометрия. Кроме того, он позволяет управлять движениями велосипедистов на основе искусственной активации мышц, синхронизированной с фазами двигательного действия, а также совершенствовать структуру соревновательного упражнения, вносить коррекцию в технику педалирования.
А. М. Козлов, кандидат педагогических парк, мастер спорта СССР, Тамбов.
В практике велоспорта тестирование и тренировка обычно производятся на велоэргометрах или на велостанках различной модификации. Основное требование, предъявляемое к такому виду технических устройств, — высокая точность регистрации динамических и кинематических характеристик педалирования в сочетании с экспресс-информацией о создаваемой спортсменом структуре соревновательного упражнения и приближенность режимов тренировочной деятельности в искусственных условиях к естественным. Для этого кинетическая энергия движения велосипедиста на треке или шоссе должна равняться кинетической энергии вращающихся частей на велотренажере, а сила торможения — силе сопротивления воздуха, возникающей вследствие движения велосипедиста. Для выполнения этих условий масса маховика на велотренажере подбирается равной 70—120 кг (Ю. Я. Прокопенко, С. С. Богдасанов, 1969; А. А. Кузнецов, 1978), а тренажер снабжают специальным тормозным устройством (М. Д. Азатян, 1960; М. Л. Пальцев, 1974). С целью имитации движения велосипедиста по трассе или треку велотренажеры могут комплектоваться лидирующими устройствами (Ю. К. Дравниек, И. В. Аулик, 1977) или проекционным экраном, воспроизводящим визуальную картину трассы (В. А. Коваленко, 1976). Однако недостатком подобного рода тренажеров остается значительное отличие условий тренировки на них от естественных.
С целью проведения исследования биомеханической модели спортивного педалирования, критериев технического мастерства и создания средств и методов управления движениями велосипедистов совместно с лабораторией биомеханики Всесоюзного научно-исследовательского института физической культуры выполнен специальный комплексный стенд для тестирования и тренировки велосипедистов.
Стенд сконструирован на базе велостанка, задние ролики которого имеют массу 115 кг, что при скорости 40—50 км/ч создает такой же момент количества движения, который наблюдается у системы спортсмен — велосипед с массой 70—80 кг в условиях трека.
Тормозящий момент, моделирующий сопротивление воздуха, создается специальным прижимным резиновым роликом, степень давления которого подбиралась экспериментально с учетом равенства мощности при педалировании с одинаковой скоростью на треке и велостенде. Для этого за основу взято положение о том, что мощность (N), развиваемая велосипедистом в условиях движения на треке, идет на преодоление сопротивления воздуха (Nв), трения качения о полотно трека (Nк), трения механических частей велосипеда (Nм) и на перемещение звеньев тела при педалировании относительно центра массы (Nз),
В случае педалирования на велостенде это выражение принимает вид:
где Nс — мощность силы трения частей велостенда;
Nт — мощность силы трения прижимного ролика.
Для спортсменов, педалирующих на своих велосипедах с одинаковой скоростью и на тех же передачах в условиях трека и велостенда, мощности, затрачиваемые на преодоление трения в подвижных частях велосипеда и на перемещение звеньев тела в естественных и искусственных условиях, будут равны. Тогда для эквивалентности механической работы необходимо равенство суммы первых двух слагаемых уравнений (1) и (2), т. е. сумма мощностей, идущих на преодоление сопротивления воздуха и трения качения при движении в естественных условиях, должна равняться сумме мощностей сил трения вращающихся частей велостенда и трения, создаваемого прижимным роликом. В этом случае условием полной идентичности движения велосипедиста в искусственных и естественных условиях будет соответствие динамических усилий, прилагаемых к педалям на одних и тех же скоростях
Регистрация динамических характеристик велосипедного педалирования осуществляется специально разработанными гензопедалями (рис. 1) и тензовелодинамометром (рис. 2). Конструкция тензопедали позволяет регистрировать усилия, развиваемые в плоскости педали, а также усилия, направленные перпендикулярно к ней. С помощью этой конструкции можно определять положение педали относительно шатуна велосипеда.
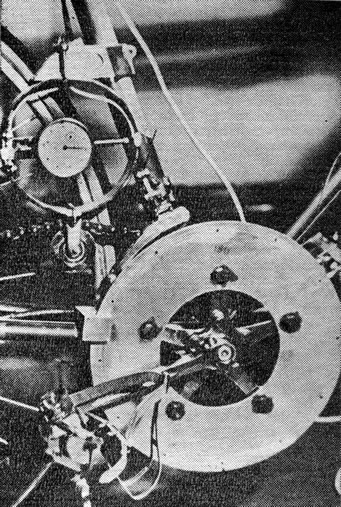
Для определения положения шатуна на окружности выполнена система (см. рис. 2), включающая в себя диск, закрепленный на ведущей шестерне и имеющий отверстия, расположенные через 30° по окружности, а также фотоэлектронное устройство, срабатывающее при прохождении мимо него отверстия диска. Для начала отсчета координат на диске сделано дополнительное отверстие, соответствующее положению правого шатуна в верхней «мертвой точке» — 0°. Данные с тензопедалей и устройства, регистрирующего положение шатуна на окружности, позволяют получать полную информацию о технике педалирования испытуемых.
В силоизмерительных элементах тензопедалей и тензовелодинамометра использованы полупроводниковые кремневые тензометры КТД2Б. Подбор и наклейка тензометров осуществлялись в соответствии с техническими условиями, разработанными отделом тензометрирования ВИСТИ.
Сборка тензометров на обоих приборах осуществлена по так называемой мостовой схеме (Б. В. Миненков, 1967).
Конструкция тензопедялей и тензовелодинамометра обеспечивает линейность динамических характеристик. Тарировка тензопедалей производилась по горизонтали от 1 до 50 кг, по вертикали — от 1 до 100 кг. Тензовелодинамометр тарировался от 1 до 120 кг. Погрешность измерений не превышает 5%.
Сигналы с тензопедалей, тензовелодинамометра и фотоэлектронного устройства, определяющего положение шатуна на окружности, в зависимости от задач исследования синхронно регистрируются на ленте шлейфного осциллографа К-121, выводятся на вектороэлектрокардиоскоп ВЭКС-01 и подаются на входы аналоговой вычислительной машины АВК-31 для последующей обработки.
Тензовелодинамометр применяется для регистрации суммарного полезного (тангенциального) усилия, развиваемого спортсменом на педалях.
Полезная мощность, развиваемая велосипедистом, может быть рассчитана по формуле:
где Fср.т — среднее тангенциальное (полезное) усилие, прилагаемое к шатунам за цикл;
l — длина окружности, описываемой педалью;
Т — время цикла.
Величина мощности в экспериментах регистрировалась тензовелодинамометром и рассчитывалась аналоговой вычислительной машиной АВК-31. При этом использовалась следующая вычислительная процедура:
где R — длина шатуна;
Т — период цикла педалирования;
Fт — сила, регистрируемая тензовелодинамометром; ,
dt — расстояние, пройденное шатуном за измеряемый отрезок времени.
Эта формула получена при анализе кинематической схемы, представленной на рис. 3. При этом считалось, что круговая частота педалирования постоянна в течение всего цикла, так как расчеты показывают, что величина изменений круговой частоты в цикле при равномерном движении велосипедиста не превышает 1%.
Данный подход использовался для получения зависимости скорости передвижения велосипедиста по треку от величины полезной мощности, развиваемой на педалях, С этой целью велосипед, оснащенный тензопедалями и тензовелодинамометром, был укомплектован радиотелеметрической системой «Спорт-4». Величина усилий в виде электрических сигналов передавалась через радиоканал, записывалась на магнитофоне «Брюль и Къер» и обрабатывалась на аналоговой вычислительной машине АВК-31. Полученная зависимость представлена на рис. 4.
На основе полученной зависимости производилась тарировка величины прижима ролика к валу велостенда. Конструкция этого узла представлена на рис. 5. Во время педалирования на стенде путем изменения усилия стяжным винтом добивались равенства полезной мощности, развиваемой велосипедистом на педалях, значениям, полученным при движении по треку. После тарировки были сняты годографы усилий при педалировании на велостенде и треке. Анализ полученных данных указывает на то, что разработанный велостенд обеспечивает воспроизведение естественных режимов педалирования не только по мощности, но и по характеру динамических усилий на педалях.
Для точного определения расстояния, условно проезжаемого велосипедистом на стенде, длина окружности роликов выполнена равной 0,3333 м, что составляет 0,001 от длины полотна трека. Подсчет числа оборотов ролика позволяет определить условно пройденное расстояние с точностью до 0,3 м. С этой целью на велостенде установлен фотоэлектрический датчик.
Моделирование движения по треку осуществляется при помощи электронного прибора «Лидер», устанавливаемого перед спортсменом. На экране прибора по овалу в виде трека расположены микролампочки. Внешний круг предназначен для светолидера, внутренний — отражает истинную скорость движения велосипедиста. Конструкцией «Лидера» предусмотрено начало движения со старта в индивидуальном темпе. После прохождения половины первого крута включается лидирующий ряд лампочек, «ведущий» спортсмена на запланированный результат. На лицевой панели прибора установлены соответствующие тумблеры и световое табло, показывающее время прохождения каждого круга и число пройденных кругов.
На рис. 6 представлена блок-схема электронного устройства «Лидер». Принцип его работы следующий: после включения тумблера «Старт» в устройстве управления и начала педалирования (вращения инерционных роликов с нанесенной на одном из них световой меткой) импульсы, зарегистрированные фотодатчиком 9, усиливаются усилителем 10 и поступают на вход одновибратора 11. Длительность импульсов, вырабатываемых одновибратором, равна 20 мс и выбрана из учета максимальной скорости велосипедиста. Введение в схему устройства одновибратора 11 исключает ложное срабатывание при возникновении световой помехи на фотодатчике 9. Импульсы с входа одновибратора 11 поступают на вход счетчика 12. Коэффициент счетчика равен 1000, что соответствует длине трека (т. е. 1000 оборотов инерционного ролика на стенде соответствует 1 кругу на треке). С выхода счетчика 12 импульсы в параллельном коде поступают на вход дешифратора 13, где преобразуются в последовательный код и, проходя через блок ключей 14, служащих для умножения дешифратора 13, поочередно включают световые индикаторы 15, расположенные на лицевой панели прибора, и показывают место, где на «треке» находится в данный момент велосипедист. Для задания определенной скорости движения велосипедиста служит световой лидер 21, который позволяет задавать время в пределах от 20 до 30 с на один круг с интервалом 0,5 с, что соответствует результату от III разряда до результата, превышающего мировой рекорд. Информация о величине скорости передается велосипедисту путем изменения скорости бегущей световой дорожки. Счетчик кругов 16 служит для задания числа кругов от 1 до 12 (что равняется дистанции от 333,3 м до 4 км). После того как будет достигнуто установленное число кругов, происходит автоматическая остановка светового лидера.
Одновременно с включением тумблера «Старт» происходит запуск электронного секундомера, который регистрирует время прохождения дистанции с точностью 0,01 с. Предъявление информации о величине времени происходит после прохождения каждого круга и прекращается после прохождения всей дистанции. Выведение всех электронных световых табло в нулевое положение осуществляется путем перевода тумблера на устройстве управления в положение «0».
На велостенде, оснащенном «Лидером», можно проводить тестирование спортсмена на его «боевом» велосипеде в привычной для него посадке и на любой передаче.
С целью проверки идентичности условий педалирования на велостенде и в естественных условиях трека был проведен эксперимент, в котором приняли участие 8 спортсменов (спортивная квалификация от II разряда до мастера спорта). Спортсмены первоначально в соревновательных условиях на треке преодолели 1 и 4 км с места, затем такие же испытания были проведены в условиях стенда. Математическая обработка данных показала, что результаты тестирования на велостенде имеют высокую статистически достоверную связь со спортивным результатом на треке (r=0,89), что позволяет воспроизводить его на велостенде с точностью ±0,65 с на дистанции 1 км и ±2,60 с — на 4 км.
Таким образом, разработанный стенд позволяет с высокой точностью моделировать условия соревновательной деятельности и в совокупности с другими методиками, такими как газоанализ, вектородинамография, миография, сейсмомиотонометрия. Кроме того, он позволяет управлять движениями велосипедистов на основе искусственной активации мышц, синхронизированной с фазами двигательного действия, а также совершенствовать структуру соревновательного упражнения, вносить коррекцию в технику педалирования.
А. М. Козлов, кандидат педагогических парк, мастер спорта СССР, Тамбов.
Велосипедный спорт. Ежегодник. 1984 год.
Большое спасибо: Застройщик выставочных стендов в Москве, проектирование, изготовление и дизайн стендов.
Предыдущие статьи
→ Эффективность работы спортсмена при гонке преследования на 4 км
→ Измерение факторов для оценки скоростно-силовой подготовленности
→ Влияние тренировочных нагрузок на равнине и в горах
→ Факторы влияющие на силу воздушного сопротивления в велоспорте
→ Тенденции двухциклового планирования подготовки велосипедистов
→ Тренировка шоссейников при различном объеме нагрузки
→ Оценка качества педалирования велосипедиста
→ Особенности подготовки к заездам на сверхдлинные дистанции
→ Анализ тактики в индивидуальной гонке преследования на 4 км
→ Индивидуализация скоростно-силовой тренировки спринтеров
→ Измерение факторов для оценки скоростно-силовой подготовленности
→ Влияние тренировочных нагрузок на равнине и в горах
→ Факторы влияющие на силу воздушного сопротивления в велоспорте
→ Тенденции двухциклового планирования подготовки велосипедистов
→ Тренировка шоссейников при различном объеме нагрузки
→ Оценка качества педалирования велосипедиста
→ Особенности подготовки к заездам на сверхдлинные дистанции
→ Анализ тактики в индивидуальной гонке преследования на 4 км
→ Индивидуализация скоростно-силовой тренировки спринтеров
Текущая статья
• Комплексный стенд для тестирования велосипедистов
Следующая статья
Разместите ссылку на статью на своем сайте, блоге или форуме:
HTMLTextBB Code
Напишите свой отзыв к этой статье
Пока нет комментариев, смелее!
Итоги выступления советских велосипедистов в гонках по треку
Результаты выступления велосипедистов на Олимпиаде 1980 года
О технике педалирования велосипедистов-шоссейников
Средства восстановления велосипедистов-шоссейников
Тенденции двухциклового планирования подготовки велосипедистов
Сергей Сухорученков — лучший велосипедист мира 1979 и 1980 годов
Оценка качества педалирования велосипедиста
Советы врача начинающим велосипедистам